Bir gömülü platform, elektronik bir ürünü etrafında inşa edeceğiniz “parçalar kiti” gibidir. Genellikle bir ana çip (mikrodenetleyici veya işlemci), destek bileşenleri (güç, saatler, bağlantı), referans tasarımlar ve fikirden çalışır bir cihaza geçmek için gereken yazılım araçları ve kütüphaneleri içerir.
Bir sensör ekosistemi ise hareket, basınç, sıcaklık gibi sensörlerin yanı sıra sürücüler, kalibrasyon rehberleri, örnek kod ve bazen ham okumaları kullanılabilir bilgilere dönüştüren önceden hazırlanmış algoritmaları kapsayan eşleşmiş settir.
Platformlar önemlidir çünkü ekiplerin her seferinde temelleri yeniden icat etmek yerine kanıtlanmış yapı bloklarını yeniden kullanmasına izin verir.
İyi desteklenen bir platform ailesi içinde kaldığınızda tipik olarak elde edersiniz:
- Daha hızlı geliştirme: hazır firmware kütüphaneleri, değerlendirme kartları ve örnek projeler prototiplemeyi hızlandırır.
- Daha kolay ölçekleme: düşük maliyetli bir cihazdan daha yüksek performanslı bir versiyona her şeyi yeniden yazmadan geçiş yapabilirsiniz.
- Daha öngörülebilir üretim: referans tasarımlar ve doğrulanmış kombinasyonlar, prototipten üretime geçerken sürprizleri azaltır.
Özellikle STMicroelectronics için “platform”, genellikle STM32 (MCU), STM32MPx (MPU), bağlantı çipleri/modülleri, güç çözümleri ve geliştirme araçları kombinasyonunu; sensör ekosistemi ise yaygın olarak ST MEMS sensörleri ve hareket işleme ile çevresel ölçümler için destek yazılımlarını içerir.
Bu kılavuzda ne beklemelisiniz
Bu makale ST’nin ortak yapı taşlarına ve bunların gerçek ürünlerde nasıl bir araya geldiğine odaklanır: hesaplama (MCU/MPU), algılama (MEMS ve çevresel), bağlantı, güç ve güvenlik. Amaç her parça numarasını kataloglamak değil; uyumlu bileşenleri seçerken kullanılan “sistem düşüncesini” anlamanıza yardımcı olmaktır.
Bunun arabalar, IoT ve fabrikalarla eşlemesi
- Arabalar (otomotiv elektroniği) genellikle güvenlik, güvenilirlik ve iç araç ağlarına öncelik verir—sensörler stabilite, konfor ve izleme gibi kritik işlevlere veri sağlar.
- IoT uç cihazları genellikle düşük güç, küçük boyut ve akıcı kullanıcı deneyimi için optimize edilir—sensörler ve kablosuz bağlantılar verimli olmalıdır.
- Endüstriyel otomasyon deterministik davranışa, uzun servis ömrüne ve zorlu ortamlarda dayanıklılığa vurgu yapar—platform seçimleri yıllarca sabit kalmayı gerektirir.
Bu üç alanı akılda tutarak, sonraki bölümler ST’nin platform yaklaşımının sistemleri nasıl daha kolay inşa, doğrulama ve bakım yapılabilir hale getirdiğini gösteriyor.
Temel Yapı Taşları: MCU'lar, MPU'lar ve Çevresel Birimler
İnsanlar “ST platformu” dediğinde genellikle hesaplama çekirdeği (MCU veya MPU) ile tüm cihazı pratik hale getiren çevresel birimler ve yazılım desteğini anlatırlar. Doğru çekirdeği erken seçmek, özellikle sensörler, bağlantı ve gerçek zamanlı davranış söz konusu olduğunda sonradan can sıkıcı yeniden tasarımları önler.
MCU'lar vs MPU'lar: kim ne yapar?
Mikrodenetleyiciler (MCU'lar)—örneğin birçok STM32 ailesi—kontrol döngüleri, sensör okumaları, motor sürme, basit kullanıcı arayüzleri yönetme ve yaygın bağlantı (BLE/Wi‑Fi modülleri, CAN transceiver'ları vb.) için uygundur. Genellikle hızlı açılır, tek bir ana firmware görüntüsü çalıştırır ve öngörülebilir zamanlamada iyidir.
Mikroişlemciler (MPU'lar)—örneğin STM32MPx sınıfı cihazlar—daha ağır veri işleme, zengin grafik UI veya Linux tabanlı ağ yığınları gerektiğinde tercih edilir. Web UI, logging, dosya sistemleri gibi “uygulama benzeri” özellikleri kolaylaştırır, ancak güç ihtiyacı ve yazılım karmaşıklığını artırabilir.
Tasarımı belirleyebilen çevresel birimler
Çekirdek hikâyenin yalnızca yarısıdır; çevresel birim seti çoğu zaman seçimleri belirler:
- ADC/DAC analog sensörler, batarya izleme ve ses/kontrol çıkışları için
- Timer ve PWM motorlar, LED'ler, güç sahneleri ve hassas örneklemeler için
- CAN (ve otomotiv varyantları) araç ağları ve endüstriyel düğümler için
- SPI / I2C sensörler, bellekler ve genişleme çipleri için
- USB veri, güç, cihaz konfigürasyonu veya firmware güncellemeleri için
Tasarımınız birden fazla yüksek hızlı SPI hattı, senkronize PWM veya belirli bir CAN özelliği gerektiriyorsa, bu CPU hızından daha çabuk seçenekleri daraltabilir.
Gerçek zamanlı davranış: gecikme ve deterministiklik
Gerçek zamanlı olmak sadece “hızlı” değildir. Önemli olan tutarlılıktır. Kontrol sistemleri en kötü durum gecikmesi, kesme işleme ve sensör okumaları ile eylem çıktılarının zamanında olup olmadığıyla ilgilenir. İyi tasarlanmış kesme ve timer'lara sahip MCU'lar genellikle deterministiklik için en basit yoldur; MPU'larda ise genellikle daha dikkatli OS ve sürücü ayarı gerekir.
Hesaplama seçimi BOM, güç ve firmware'i etkiler
Daha üst düzey bir işlemci dış çipleri (daha az yardımcı IC) azaltabilir veya daha zengin özellikler sağlayabilir, fakat bu güç bütçesini, termal kısıtları ve firmware çabasını (boot zinciri, sürücüler, güvenlik güncellemeleri) artırabilir. Basit bir MCU BOM'u ve gücü düşürebilir, ancak karmaşıklığı firmware optimizasyonu veya özel hızlandırıcılar/çevresel birimlere itebilir.
Sensör Portföyü Temelleri: MEMS'ten Çevresel Sensörlere
STMicroelectronics'in sensör yelpazesi, bir akıllı saatten araç stabilite sistemine kadar her şeyi tek tedarikçiyle inşa etmeye yeterli genişliktedir. Pratik değeri tutarlılıktır: benzer elektriksel arabirimler, yazılım desteği ve uzun vadeli bulunabilirlik; ürünler prototipten hacme büyürken bu tutarlılık yardımcı olur.
Karşılaşacağınız yaygın sensör tipleri
Çoğu gömülü ürün küçük bir “iş atı” sensör setiyle başlar:
- Akselerometre ve jiroskoplar (IMU'lar): adım sayma, anti-tamper, araç dinamiği ve titreşim/rotasyon algısı için
- Basınç sensörleri: irtifa tahmini, HVAC izleme, su seviyesi ve pompa kontrolü, kaçak tespiti için
- Sıcaklık sensörleri: termal koruma, kalibrasyon ve konfor/kalite izleme için
- Manyetik sensörler (manyetometreler): pusula yönü, kapak/açık-kapalı algısı ve mıknatısla döner pozisyon algılama için
- ToF/proximity sensörleri: mesafe veya varlık ölçümü, jest kontrolü, yaklaşınca uyanma ve nesne/insan tespiti için
“MEMS” ne demek (ve neden her yerde)
MEMS micro-electro-mechanical systems (mikro-elektro-mekanik sistemler) demektir: genellikle silikon üzerinde üretilen ve IC gibi paketlenen küçük mekanik yapılar. MEMS, telefonlar, kulaklıklar, giyilebilirler ve yoğun endüstriyel düğümler için kompakt, düşük güçlü sensörler sağlar. Ölçeklenebilir üretim ve küçük sensör elemanları sayesinde MEMS, güvenilir performansı makul maliyetle sunmak isteyen ürünler için iyi bir eşleşmedir.
Alıcıların karşılaştırdığı özellikler (ve gerçekten neyi etkilerler)
Ekipler sensör seçerken genelde şunları karşılaştırır:
- Menzil: maksimum ölçülebilir ivme/rotasyon/basınç; çok düşük doyguna, çok yüksek ise çözünürlük kaybına neden olur.
- Gürültü: dinlenme halindeki verilere nasıl görünürlük kattığı; hareket takibi ve düşük genlikli titreşim için kritik.
- Sürüklenme (özellikle jiroskoplarda): uzun vadeli doğruluğu etkiler ve düzeltme sıklığını belirler.
- Bant genişliği: sensörün değişimlere ne kadar hızlı yanıt verebileceğini etkiler; kontrol döngüleri ve titreşim analizi için önemli.
- Örnekleme hızı (ODR): saniyede kaç okuma alındığı; tepkisellik ve güç tüketimini etkiler.
Pratik ödünler: doğruluk, maliyet, güç, yerleştirme
Daha iyi özellikler daha fazla maliyet ve güç çekebilir, ancak mekanik yerleşim aynı derecede önemlidir. Örneğin bir IMU merkezden uzak veya titreşen bir motorun yanına monte edilmişse, filtreleme ve dikkatli baskılı devre tasarımı olmadan potansiyelini gösteremez. Kompakt cihazlarda genellikle biraz daha düşük güçlü bir sensör seçip, yerleşim, kalibrasyon ve firmware yumuşatma ile hedeflenen kullanıcı deneyimine ulaşmak daha pratiktir.
Sensör Füzyonu ve Uçta Zeka
Ham sensör sinyalleri gürültülü, önyargılı ve tek başlarına çoğu zaman belirsizdir. Sensör füzyonu, akselerometre, jiroskop, manyetometre, basınç sensörü ve bazen GNSS gibi birden çok sensörden gelen okumaları birleştirerek daha temiz ve anlamlı bir tahmin üretir: yönelim, hareket, adımlar, titreşim şiddeti veya "durgun/hareket halinde" kararı gibi.
Ham sinyaller neden yeterli değil
Tek bir MEMS akselerometre size ivmeyi söyleyebilir, ama hızlı hareketler sırasında yerçekimini hareketten ayıramaz. Bir jiroskop dönüşü düzgün izler ama zamanla sürüklenir. Manyetometre uzun vadeli başlık sürüklenmesini düzeltmeye yardımcı olur; ancak yakındaki metal veya motorlar tarafından kolayca bozulur. Füzyon algoritmaları bu güçlü ve zayıf yanları dengeleyerek stabil sonuçlar üretir.
Tanıdık pratik örnekler
- Yönelim takibi: telefonlar, giyilebilirler, dronlar ve araç içi kontrol sistemleri duyarlı ve stabil tutum için 6/9 eksenli füzyon kullanır.
- Titreşim izleme: endüstriyel sensörler yüksek hızlı titreşim verilerini sıcaklık ve çalışma durumlarıyla birleştirerek normal titreşim ile rulman aşınmasını ayırt edebilir.
- Hareket algılama: ultra-düşük güçlü “wake on motion” sensör hub/MCU üzerinde çalışarak ana işlemcinin uykuya devam etmesini sağlar.
- Dead-reckoning yardımcıları: kısa GNSS kopuklukları IMU tabanlı hareket tahminleriyle köprülenebilir (tünellerde veya yoğun şehir bölgelerinde faydalı).
Uçta işleme vs ham veriyi gönderme
Füzyonu uçta çalıştırmak (bir ST MCU'sunda, gömülü sensör hub'ında veya akıllı bir MEMS cihazında) bant genişliğini büyük ölçüde azaltır: binlerce örnek/s yerine "tilt = 12°" gönderirsiniz. Bu aynı zamanda gizliliği artırır; ham hareket izlerini cihazda tutup yalnızca olayları ya da toplanmış metrikleri gönderebilirsiniz.
Kalibrasyon ve filtreleme: demo ile saha arasındaki fark
Güvenilir füzyon kalibrasyona (offsetler, ölçek faktörleri, hizalama) ve filtrelemeye (alçak/geç geçiş, uç değer reddi, sıcaklık kompanzasyonu) bağlıdır. Gerçek ürünlerde ayrıca manyetik parazit, montaj yönü değişiklikleri ve üretim varyasyonu için planlama yapılmalıdır—aksi halde aynı cihaz birimler arasında veya zamanla farklı davranır.
Otomotiv: Güvenlik, Güvenilirlik ve Araç Ağları
Yazılım temposunu koruyun
Gömülü prototipiniz hızlı ilerliyorsa, Koder.ai yazılım tarafının da aynı hızda ilerlemesine yardımcı olsun.
Arabalar gömülü ortamlar açısından özel bir türdür: elektriksel gürültüye maruz kalır, geniş sıcaklık dalgalanmalarına dayanmalıdır ve yıllarca tutarlı çalışması beklenir. Bu yüzden otomotive yönelik MCU'lar, sensörler ve güç bileşenleri genellikle ham performanstan çok nitelendirmeleri, dokümantasyonu ve uzun vadeli bulunabilirliği için seçilir.
Tipik otomotiv kullanım senaryoları
ST platformları genellikle aracın birden çok "bölgesinde" yer alır:
- Gövde kontrol ve konfor: kapı modülleri, aydınlatma kontrolü, koltuk fonksiyonları, cam kaldırıcılar ve iklim kontrol arayüzleri
- Infotainment kontrolleri: direksiyon düğmeleri, döner kollar, haptik girişler ve sensör destekli kullanıcı etkileşimleri
- Sürücü destek bileşenleri: sensör arayüzleri, zamanlama ve izleme görevleri, deterministik kontrol döngüleri—büyük ADAS bilgisayarlarına yerel I/O sağlayarak yardımcı olma
- İzleme: batarya/gerilim algılama, sıcaklık izleme, motor akım ölçümü ve sistem sağlık kontrolleri
Araç ağları: CAN ve LIN basitçe
Çoğu otomotiv ECU'su tek başına çalışmaz—araç içi ağlar üzerinden haberleşirler:
- LIN genellikle daha basit, düşük hızlı düğümler için kullanılır (ör. kapı modülü). Maliyet-etkin ve "bir ana, birçok köle" düzenleri için uygundur.
- CAN daha hızlı, daha kritik iletişim için kullanılır. Çok düğümlü mesajlaşma ve güçlü hata işleme destekler.
Bir MCU için yerleşik CAN/LIN desteği (veya transceiver ile kolay eşleşme) sadece kablolama ve maliyeti değil, aynı zamanda zamanlama davranışını ve ECU'nun araca entegrasyonunu da etkiler.
Güvenilirlik kısıtları ve güvenlik süreçlerinin rolü
Otomotiv tasarımları sıcaklık aralığına, EMI/EMC maruziyetine ve uzun servis ömrüne dayanmak zorundadır. Ayrı olarak, fonksiyonel güvenlik disiplinli gereksinimler, analiz, test ve araç desteği vurgulayan bir geliştirme yaklaşımıdır: güvenlikle ilgili fonksiyonlar sistematik şekilde ele alınıp doğrulanır. Özellikle özellik “güvenlik-kritik” değilse bile bu süreçten parçalar uygulamak geç aşama sürprizlerini ve yeniden çalışmayı azaltabilir.
IoT Cihazları: Güç, Boyut ve Kullanıcı Deneyimi
Çoğu IoT ürünü “sıkıcı” kısıtlara göre başarır veya başarısız olur: batarya ömrü, muhafaza boyutu ve cihazın duyarlı ve güvenilir hissetmesi. ST platformları ve sensör ekosistemleri burada ekiplerin algılama doğruluğu, yerel hesaplama ve bağlantıyı gereğinden fazla donanım kullanmadan dengelemesine yardımcı olma eğilimindedir.
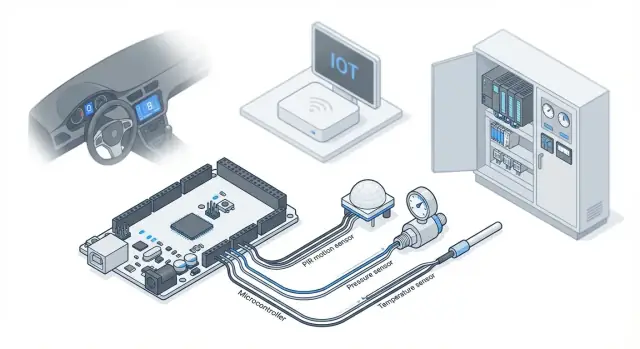
Tipik bir IoT mimarisi (ve ST parçalarının yeri)
Pratik bir IoT boru hattı genellikle şöyle görünür: sensörleme → yerel hesaplama → bağlantı → bulut/uygulama.
Sensörler (hareket, basınç, sıcaklık, biyosinyaller) ham veri üretir. Düşük güçlü bir MCU filtreleme, eşik belirleme ve basit kararlar alır; böylece radyo yalnızca gerektiğinde gönderim yapar. Bağlantı (Bluetooth LE, Wi‑Fi, sub‑GHz, hücresel veya LoRa) seçilmiş verileri telefona veya gateway'e iletir; gateway bunları gösterge panosu ve uyarılar için buluta/uygulamaya yönlendirir.
Ana fikir: mümkün olduğunca çok kararı yerelde verirseniz, pil küçük kalır ve bağlantı maliyeti düşer.
Güç bütçesi düşüncesi: uyku, görev döngüsü, olayla uyanma
Batarya ömrü nadiren tepe akımıyla alakalıdır; yatma süresiyle ilgilidir. İyi tasarımlar bütçeyle başlar: cihaz günde kaç dakika uyanık kalabilir, örnekleme yapabilir, işleyebilir ve iletim yapabilir?
- Uyku modları MCU'yu çoğunlukla derin düşük güç halinde tutar.
- Duty cycle'lar ne sıklıkla örnek alacağınızı tanımlar (ör. sıcaklık okumak her 10 dakikada mı yoksa her 10 saniyede mi).
- Wake-on-event hareket sensörü gibi kesmelerle sistemi yalnızca anlamlı bir şey olduğunda uyandırır.
Bu noktada sensör özellikleri MCU kadar önemlidir: olayı kendi başına algılayabilen bir sensör ana işlemci ve radyo gereksiz yere uyandırmaz.
Örnekler: ödünleri somutlaştırma
- Akıllı kilitler: hızlı uyanma ve güvenilir hareket/dokunma algısı “anında” hissettirir. Yanlış tetiklemeler bataryayı tüketir ve kullanıcıyı rahatsız eder.
- Giyilebilirler: sensör kalitesi adım sayımı, nabız stabilitesi ve algılanan doğruluğu etkiler; kötü filtreleme gürültülü grafiklere ve güven kaybına yol açar.
- Varlık izleyiciler: konum ve hareket özellikleri sürekli raporlamayı (yüksek maliyet) önleyecek şekilde ayarlanmalı ama gerçek hareketi yakalayacak biçimde olmalı.
- Ev sensörleri: mantıklı örnekleme ve paketlenmiş iletimle yıllarca çalışabilir.
Sensör seçiminin kullanıcı deneyimini şekillendirmesi
UX sadece uygulama değildir—cihazın nasıl davrandığı da UX'tir. Titreşimle tetiklenen bir hareket sensörü hayali alarmlara neden olabilir; yavaş tepki veren çevresel bir sensör gerçek değişiklikleri kaçırabilir; zayıf bir güç tasarımı “bir yıllık pil” sözünü üç aya indirebilir.
Gürültü, gecikme ve düşük güç yeteneklerine göre sensör ve MCU'yu birlikte seçmek, cihazın duyarlı hissetmesini, yanlış alarmları azaltmasını ve pil ömrü hedeflerini maliyet veya boyut artışı olmadan karşılamanızı sağlar.
Endüstriyel Kontrol: Belirlenebilirlik, Zorlu Ortamlar, Uzun Ömür
Anlık görüntülerle güvenle yineleyin
Sensör mantığı veya UI değişiklikleri bozulduğunda hızlıca geri alınabilmesi için çalışan durumları yakalayın.
Endüstriyel kontrol daha gösterişli özelliklerden ziyade uzun süre öngörülebilir davranış ile ilgilidir. PLC'ye bitişik bir modül, motor sürücüsü veya durum izleme düğümü inşa ediyor olun, platform seçimi deterministik zamanlama, gürültülü ortamlarla başa çıkma ve yıllarca servis edilebilme desteği sunmalıdır.
Yaygın bir desen PLC'ye “yan kutu” olarak mikrodenetleyici tabanlı bir modül eklemektir: ek I/O, özel ölçüm veya bağlantı sağlamak için. ST MCU'lar ayrıca motor kontrolü (sürücüler, pompalar, konveyörler), ölçüm sayaçları ve durum izleme uygulamalarında sıkça kullanılır—genellikle gerçek zamanlı kontrol döngülerini sensör toplama ve yerel kararlarla birleştirirler.
Belirlenebilirlik: güvenilir zamanlama
Deterministik kontrol, örnekleme, kontrol döngüsü yürütme ve çıkışların her çevrimde beklendiği gibi gerçekleşmesi anlamına gelir. Pratik olanaklar:
- Hassas motor kontrol ve aktüatör zamanlaması için donanım timer ve PWM birimleri
- Örnekleme ve güvenlik reaksiyonları için hızlı, öngörülebilir kesme işleme
- Sıkı ölçüm–eylem yolları için ADC'ler ve karşılaştırıcılar (ör. akım ölçümü)
Tasarım hedefi, iletişim, logging veya UI meşgul olsa bile zaman kritik görevleri stabil tutmaktır.
Zorlu ortamlar: titreşim, toz ve elektriksel gürültü
Endüstriyel sahalar, tüketici cihazlarının nadiren karşılaştığı mekanik stres ve elektriksel parazite sahiptir. Önemli hususlar: motor çevresinde özellikle titreşim, toz ve nem girişi ile anahtarlama yüklerinden kaynaklanan elektriksel gürültü. Sensör seçimi ve yerleştirme burada çok önemlidir—titreşim izleme için akselerometreler, sürücüler için akım/gerilim algılama ve muhafaza koşullarının güvenilirliği etkilediği yerler için çevresel sensörler.
Entegrasyon gereklilikleri: izolasyon, analog ön uçlar, sinyal bütünlüğü
Birçok endüstriyel sinyal doğrudan bir mikrodenetleyiciye bağlanamaz.
- İzolasyon: yüksek voltajlı alanlarla veya gürültülü saha kablolarıyla arayüz için gerekir (insanları ve elektroniği korumak için).
- Analog ön uçlar (AFE): düşük seviyeli sensör çıkışlarını koşullandırır, filtreler ve ADC için uygun hale getirir.
- Sinyal bütünlüğü: düzen, topraklama ve filtreleme EMI kaynaklı yanlış okumaları azaltır—stabil kontrol ve güvenilir teşhis için kritiktir.
Uzun ömür ve sürdürülebilirlik
Endüstriyel dağıtımlar uzun servis ömrünü planlamalı: yedek birimler, bileşen bulunabilirliği ve operasyonu kesintiye uğratmayacak firmware güncellemeleri. Pratik bir yaşam döngüsü yaklaşımı sürümlü firmware, güvenli güncelleme mekanizmaları ve hızlıca sorun giderme yapacak açık teşhisler içerir.
Bağlantı Seçimleri: Arabalar, IoT ve Fabrikalar Arası
Kodu dışa aktararak esnek kalın
Şimdi ivmeyi kaybetmeyin; hazır olduğunuzda kaynak kodunu dışa aktarın ve repoyu sahiplenin.
Bağlantı, gömülü platformun “sensörlü bir kart” olmaktan çıkıp bir sistem haline gelmesini sağlar: bir araç ağı, bir binadaki cihazlar veya üretim hattı. ST tabanlı tasarımlar genellikle iş için bir veya daha fazla radyo ya da kablolu arayüz ile MCU/MPU'ları eşleştirir.
Yaygın seçenekler (ve nerede iyi oldukları)
BLE telefonlara, konfigürasyon araçlarına veya yakın hub'lara kısa menzilli bağlantılar için çok uygundur. Genellikle düşük güç için en kolay yol, fakat yüksek veri oranları veya uzun mesafeler için tasarlanmamıştır.
Wi‑Fi doğrudan yönlendiriciye bağlanacak cihazlar (kamera, beyaz eşya, gateway) için daha yüksek bant genişliği sağlar. Bedeli güç tüketimi ve anten/muhafaza işidir.
Ethernet fabrika ortamı için sağlam kablolu bant genişliği ve öngörülebilir davranış sunar. Aynı zamanda artan bant genişliği ihtiyaçlarıyla birlikte otomotivde (Automotive Ethernet) de yaygınlaşıyor.
Hücresel (LTE-M/NB-IoT/4G/5G) altyapı yoksa geniş alan kapsaması içindir. Maliyet, sertifikasyon çabası ve sürekli açık kullanım için güç gereksinimlerini artırır.
Sub‑GHz (ör. 868/915 MHz) düşük veri hızlarında uzun menzilli bağlantı hedefler; nadiren paketleyen sensörler için uygundur.
Nasıl seçilir: menzil, hız, güç ve kurallar
Mesaj boyutu ve menzille başlayın (sıcaklık okumaları vs. ses akışı), sonra batarya ömrü ve tepe akım ihtiyaçlarını doğrulayın. Son olarak bölgesel düzenlemeleri hesaba katın (lisanslı hücresel vs lisanssız sub‑GHz limitleri, kanal planları, iletim gücü).
Gateway vs direkt buluta
Bir yerel gateway, ultra-düşük güçlü uç noktalar istiyorsanız, protokolleri (BLE/sub‑GHz → Ethernet) köprülemek istiyorsanız veya internet koptuğunda tamponlama gerekiyorsa anlamlıdır.
Direkt buluta bağlanma (Wi‑Fi/hücresel) tek cihazlar için mimariyi basitleştirir, fakat güç tasarımı, cihaz sağlama ve sürekli bağlantı maliyetlerini karmaşıklaştırır.
Pratik tasarım etkileri: antenler ve muhafazalar
Metal muhafazalar, bataryalar, kablo demetleri veya kullanıcının eli anten performansını bozabilir. Klerance planlayın, malzemeleri dikkatle seçin ve son muhafaza ile erken test edin—bağlantı problemleri genellikle mekaniktir, firware değil.
Güvenlik ve Cihaz Yaşam Döngüsü: Açılıştan Güncellemelere
Güvenlik "sonradan eklenen" bir özellik değildir. Gömülü platformlarda ve sensörlerde, cihaz güç açıldığında başlayan ve ürün emekliye ayrılana kadar süren bir karar zinciridir.
Güvenlik yapı taşları (pratik bakış)
Ortak bir temel secure boot'tur: cihaz firmware'in yetkili olduğunu doğrulamadan çalıştırmaz. ST platformlarında bu genellikle donanım kökenli güven ile (MCU güvenlik özellikleri veya ayrı bir secure element) ve imzalı görüntülerle uygulanan bir yaklaşımdır.
Ardından anahtar depolama gelir. Anahtarlar düz flaş içinde değil, çıkarılmaya karşı dayanıklı yerlerde tutulmalıdır—ya MCU'nun korumalı bölgeleri ya da bir secure element—bu da şifreli firmware güncellemelerine izin verir (cihaz imzayı doğrular ve gerekirse yükü şifre çözer).
Tehdit modelleri alana göre nasıl değişir
Tüketici IoT cihazları genellikle büyük ölçekli, uzaktan saldırılar (botnetler, kimlik bilgisi tahmini, fiziksel erişim) tehdidi altındadır. Endüstriyel sistemler hedefe yönelik kesintiye, çalışma süresine ve sınırlı yama pencelerine odaklanır. Otomotiv elektroniklerinde ise güvenlikle ilişkilendirilebilecek riskler, karmaşık tedarik zincirleri ve hangi ECU'nun neyi güncelleyebileceği üzerinde sıkı kontrol gerektirir.
Yaşam döngüsü düşüncesi: provisyondan dekomisyona
Provisyon (üretimde anahtar/kimlik enjeksiyonu), güncellemeler (A/B swap veya rollback koruması) ve dekomisyon (kimlik iptali, hassas verilerin temizlenmesi, destek sonu belgelenmesi) planlayın.
Uyum için neyi belgelemeli (abartmadan)
Açıkça belgeleyin: tehdit modeliniz, secure boot/güncelleme akışı, anahtar yönetimi ve rotasyonu, zafiyet alımı ve yama politikası, SBOM ve test kanıtları (penetrasyon sonuçları, fuzzing notları, güvenli kodlama uygulamaları). Yapılanları açıklayın ve ölçün—sertifika iddiasında bulunmadan önce gerçekten tamamlanmış olduğundan emin olun.