23 ก.ค. 2568·2 นาที
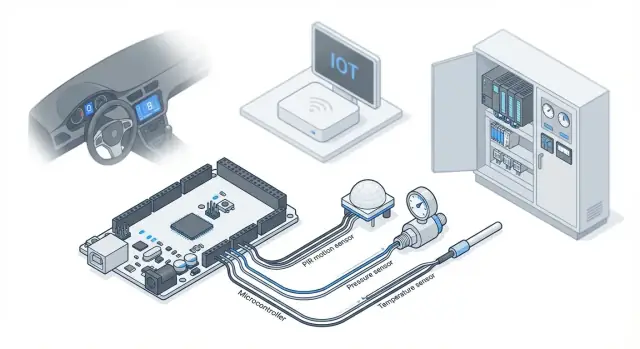
แพลตฟอร์มและระบบเซ็นเซอร์ของ STMicroelectronics: ยานยนต์, IoT, อุตสาหกรรม
เรียนรู้ว่าแพลตฟอร์มฝังตัว MCU และระบบเซ็นเซอร์ของ STMicroelectronics สนับสนุนความปลอดภัยยานยนต์ ผลิตภัณฑ์ IoT และระบบควบคุมอุตสาหกรรมอย่างไร
เรียนรู้ว่าแพลตฟอร์มฝังตัว MCU และระบบเซ็นเซอร์ของ STMicroelectronics สนับสนุนความปลอดภัยยานยนต์ ผลิตภัณฑ์ IoT และระบบควบคุมอุตสาหกรรมอย่างไร
“แพลตฟอร์มฝังตัว” คือ “ชุดชิ้นส่วน” ที่คุณสร้างผลิตภัณฑ์อิเล็กทรอนิกส์ขึ้นรอบๆ โดยปกติจะรวมชิปหลัก (ไมโครคอนโทรลเลอร์หรือโปรเซสเซอร์), ส่วนประกอบสนับสนุน (พาวเวอร์, นาฬิกา, การเชื่อมต่อ), แบบอ้างอิงการออกแบบ และเครื่องมือ/ไลบรารีซอฟต์แวร์ที่ต้องใช้เพื่อเปลี่ยนแนวคิดเป็นอุปกรณ์ที่ใช้งานได้
“ระบบนิเวศเซ็นเซอร์” คือชุดเซ็นเซอร์ที่เข้ากันได้ (การเคลื่อนไหว ความดัน อุณหภูมิ ฯลฯ) พร้อมไดรเวอร์ คำแนะนำการคาลิเบรชัน ตัวอย่างโค้ด และบางครั้งอัลกอริธึมที่ช่วยแปลงการอ่านดิบให้เป็นข้อมูลที่มีประโยชน์
แพลตฟอร์มช่วยให้ทีมงาน นำชิ้นส่วนที่พิสูจน์แล้วกลับมาใช้ใหม่ แทนที่จะประดิษฐ์พื้นฐานเดิมซ้ำทุกครั้ง
เมื่อคุณอยู่ในตระกูลแพลตฟอร์มที่ได้รับการสนับสนุนดี มักจะได้ประโยชน์คือ:
สำหรับ STMicroelectronics โดยเฉพาะ “แพลตฟอร์ม” มักหมายถึงการผสมของ STM32 (MCUs), STM32MPx (MPUs), ชิป/โมดูลการเชื่อมต่อ, โซลูชันพาวเวอร์, และเครื่องมือพัฒนา ขณะที่ระบบนิเวศเซ็นเซอร์มักรวม เซ็นเซอร์ MEMS ของ ST และซอฟต์แวร์สนับสนุนสำหรับการประมวลผลการเคลื่อนไหวและการวัดสภาพแวดล้อม
บทความนี้มุ่งเน้นที่ บล็อกการสร้างทั่วไปของ ST และวิธีการที่ชิ้นส่วนเหล่านี้ประกอบกันในผลิตภัณฑ์จริง: การประมวลผล (MCU/MPU), การรับรู้ (MEMS และเซ็นเซอร์สภาพแวดล้อม), การเชื่อมต่อ, พาวเวอร์, และความปลอดภัย เป้าหมายไม่ใช่การลงรายการหมายเลขชิ้นส่วนทั้งหมด แต่เพื่อช่วยให้คุณเข้าใจ “มุมมองระบบ” ในการเลือกชิ้นส่วนที่เข้ากันได้
โดยยึดสามโดเมนนี้เป็นแนวทาง ส่วนที่เหลือจะแสดงว่าการใช้แนวทางแพลตฟอร์มของ ST ช่วยให้คุณประกอบระบบที่ง่ายต่อการสร้าง ตรวจสอบ และดูแลอย่างไร
เมื่อคนพูดถึง “แพลตฟอร์ม ST” มักหมายถึงคอร์การประมวลผล (MCU หรือ MPU) พร้อมอุปกรณ์ต่อพ่วงและการสนับสนุนซอฟต์แวร์ที่ทำให้อุปกรณ์ทั้งหมดใช้งานได้ การเลือกคอร์ที่เหมาะสมตั้งแต่ต้นจะป้องกันการออกแบบซ้ำที่เจ็บปวดภายหลัง—โดยเฉพาะเมื่อมีเซ็นเซอร์ การเชื่อมต่อ และพฤติกรรมเรียลไทม์เข้ามาเกี่ยวข้อง
ไมโครคอนโทรลเลอร์ (MCUs) — ตัวอย่างเช่นตระกูล STM32 — เหมาะกับ วงจรควบคุม การอ่านเซ็นเซอร์ ขับมอเตอร์ จัดการอินเทอร์เฟซผู้ใช้เรียบง่าย และการเชื่อมต่อทั่วไป (โมดูล BLE/Wi‑Fi, ทรานซีฟเวอร์ CAN ฯลฯ) พวกมันมักบูตเร็ว รันภาพเฟิร์มแวร์หลักหนึ่งไฟล์ และเด่นเรื่องการกำหนดเวลาที่คาดเดาได้
ไมโครโปรเซสเซอร์ (MPUs) — เช่นอุปกรณ์ระดับ STM32MP1 — ใช้เมื่อคุณต้องการการประมวลผลข้อมูลหนัก UI กราฟิก หรือสแต็กเน็ตเวิร์กแบบ Linux พวกมันอำนวยความสะดวกฟีเจอร์แบบแอป (เว็บ UI, การเก็บล็อก, ระบบไฟล์) แต่เพิ่มความต้องการพลังงานและความซับซ้อนของซอฟต์แวร์
คอร์เป็นเพียงครึ่งเรื่อง; ชุดอุปกรณ์ต่อพ่วง มักกำหนดการเลือก:
ถ้าการออกแบบของคุณต้องการบัส SPI ความเร็วสูงหลายช่อง, PWM ซิงโครไนซ์ หรือฟีเจอร์ CAN เฉพาะ นั่นจะจำกัดตัวเลือกเร็วกว่าความเร็วซีพียู
เรียลไทม์ไม่ใช่แค่ “เร็ว” แต่มันต้อง สม่ำเสมอ ระบบควบคุมดูแลความหน่วงแย่ที่สุด การจัดการอินเทอร์รัปต์ และว่าอ่านเซ็นเซอร์กับเอาต์พุตแอคชูเอเตอร์เกิดตรงเวลา MCUs ที่ออกแบบอินเทอร์รัปต์และไทเมอร์ดีมักเป็นทางง่ายที่สุดสู่ determinism; MPUs ก็ทำได้ แต่ต้องปรับแต่ง OS และไดรเวอร์อย่างระมัดระวัง
โปรเซสเซอร์ระดับสูงอาจลดจำนวนชิปภายนอก (ชิ้นส่วนเสริม) หรือเปิดใช้งานฟีเจอร์ที่ซับซ้อน แต่จะเพิ่ม งบพลังงาน, ข้อจำกัดด้านความร้อน, และ ความพยายามด้านเฟิร์มแวร์ (โซ่บูต ไดรเวอร์ การอัปเดตความปลอดภัย) MCU ที่เรียบง่ายสามารถลด BOM และพลังงานได้ แต่บางครั้งอาจเพิ่มความซับซ้อนในเฟิร์มแวร์หรือจำเป็นต้องมีตัวเร่งความเร็ว/อุปกรณ์ต่อพ่วงเฉพาะ
ไลน์อัพเซ็นเซอร์ของ STMicroelectronics กว้างพอที่คุณจะสร้างตั้งแต่สมาร์ทวอทช์จนถึงระบบความเสถียรของยานยนต์โดยไม่ต้องผสมผู้ผลิต ประโยชน์เชิงปฏิบัติคือความสอดคล้อง: อินเทอร์เฟซไฟฟ้าที่คล้ายกัน การสนับสนุนซอฟต์แวร์ และความพร้อมใช้งานระยะยาว ขณะที่ผลิตภัณฑ์ขยายจากต้นแบบสู่ปริมาณ
ส่วนใหญ่ผลิตภัณฑ์ฝังตัวเริ่มจากชุดเซ็นเซอร์ “งานหนัก” เล็กๆ:
MEMS ย่อมาจาก micro-electro-mechanical systems: โครงสร้างกลขนาดจิ๋วที่ผลิตบนซิลิคอน มักแพ็กเกจเหมือน IC MEMS ทำให้เซ็นเซอร์มีขนาดกะทัดรัด กินพลังงานต่ำ และผลิตได้จำนวนมาก จึงเหมาะกับอุปกรณ์ที่ต้องการประสิทธิภาพเชื่อถือได้ในต้นทุนที่เหมาะสม
ทีมงานมักเปรียบเทียบ:
สเป็กที่ดีกว่ามักมีราคาสูงและใช้พลังงานมากขึ้น แต่ การวางตำแหน่งเชิงกล ก็สำคัญไม่แพ้กัน ตัวอย่างเช่น IMU ติดตั้งห่างจากจุดหมุนหรือใกล้มอเตอร์สั่นอาจต้องมีการกรองและออกแบบบอร์ดอย่างระมัดระวังเพื่อให้ได้ผลตามที่คาดหวัง ในอุปกรณ์กะทัดรัด มักเลือกเซ็นเซอร์ที่ใช้พลังงานต่ำกว่าแล้วลงทุนในตำแหน่งคาลิเบรชัน และการเรียบเนียนในเฟิร์มแวร์เพื่อให้ได้ประสบการณ์ผู้ใช้ตามเป้า
สัญญาณเซ็นเซอร์ดิบมีโน๊ยซ์ ลำเอียง และมักคลุมเครือเมื่อตัวมันคนเดียว การผสานเซ็นเซอร์ รวมการอ่านจากหลายเซ็นเซอร์—มักเป็น accelerometer, gyroscope, magnetometer, pressure และบางครั้ง GNSS—ให้เป็นการประเมินที่สะอาดและมีความหมายมากขึ้น: ออร์ริเอ้นเทชัน การเคลื่อนไหว การนับก้าว ระดับการสั่น หรือการตัดสินใจว่ายังนิ่ง/กำลังเคลื่อนไหว
Accelerometer เดียวบอกความเร่งได้ แต่แยกแรงโน้มถ่วงจากการเคลื่อนไหวเร็วๆ ไม่ออก ไจโรติดตามการหมุนได้เรียบแต่มีการลอยเมื่อเวลาผ่านไป แม็กเนโตมิเตอร์ช่วยแก้การลอยระยะยาวของหัวทางแต่ถูกรบกวนโดยโลหะหรือมอเตอร์ อัลกอริธึมการผสานชั่งน้ำหนักจุดแข็งและจุดอ่อนเหล่านี้เพื่อให้ได้ผลลัพธ์ที่นิ่ง
การรันการผสานที่ edge (บน MCU ของ ST, ฮับเซ็นเซอร์ฝังตัว, หรือตัว MEMS อัจฉริยะ) ลดแบนด์วิดท์อย่างมาก: คุณส่ง "tilt = 12°" แทนที่จะส่งตัวอย่างหลายพันค่าต่อวินาที นอกจากนี้ยังช่วยเรื่องความเป็นส่วนตัวเพราะเก็บสัญญาณดิบไว้ในเครื่องและส่งเฉพาะเหตุการณ์หรือเมตริกที่สรุปแล้ว
การผสานที่เชื่อถือได้ขึ้นกับการคาลิเบรชัน (ออฟเซต, ปัจจัยสเกล, การจัดแนว) และการกรอง (low-pass/high-pass, การปฏิเสธ outlier, การชดเชยอุณหภูมิ) ในผลิตภัณฑ์จริง คุณต้องวางแผนรับสัญญาณรบกวนแม่เหล็ก การเปลี่ยนตำแหน่งการติดตั้ง และความแปรผันในการผลิต—มิฉะนั้นอุปกรณ์เดียวกันอาจทำงานต่างกันในแต่ละหน่วยหรือเมื่อเวลาผ่านไป
รถยนต์เป็นสภาพแวดล้อมฝังตัวชนิดพิเศษ: มีสัญญาณรบกวนทางไฟฟ้าสูง แปรผันอุณหภูมิกว้าง และคาดหวังให้ทำงานได้อย่างต่อเนื่องหลายปี นั่นคือเหตุผลที่ MCU เซ็นเซอร์และส่วนประกอบพาวเวอร์ที่มุ่งสู่ยานยนต์มักถูกเลือกจากคุณสมบัติการรับรอง เอกสาร และความพร้อมใช้งานระยะยาวเทียบกับเพียงแค่ประสิทธิภาพ
แพลตฟอร์มของ ST มักปรากฏในหลาย “โซน” ของรถ:
ECU ส่วนใหญ่ในรถไม่ทำงานโดดๆ—พวกมันสื่อสารผ่านเครือข่ายในรถ:
สำหรับ MCU การมี CAN/LIN ในตัว (หรือการจับคู่กับทรานซีฟเวอร์ที่ง่าย) ส่งผลไม่เพียงแต่การเดินสายและต้นทุน แต่ยังรวมถึงพฤติกรรมเชิงเวลาและการผสานเข้ากับระบบรถได้สะอาดขึ้น
การออกแบบยานยนต์ต้องทนต่อ ช่วงอุณหภูมิ, การรบกวน EMI/EMC, และ อายุการใช้งานยาวนาน แยกต่างหาก ความปลอดภัยเชิงหน้าที่ (functional safety) เป็นแนวทางการพัฒนาที่เน้นข้อกำหนดที่มีวินัย การวิเคราะห์ การทดสอบ และการสนับสนุนเครื่องมือ เพื่อให้ฟังก์ชันที่เกี่ยวข้องกับความปลอดภัยถูกออกแบบและตรวจสอบอย่างเป็นระบบ แม้ฟีเจอร์ของคุณจะไม่ใช่ “ความปลอดภัย-วิกฤต” การนำส่วนหนึ่งของกระบวนการนั้นมาใช้ก็ลดความประหลาดใจและงานแก้ไขในระยะหลังได้
ผลิตภัณฑ์ IoT ส่วนใหญ่ชนะหรือแพ้ที่ข้อจำกัดที่ “ไม่น่าตื่นเต้น”: อายุแบตเตอรี่ ขนาดเคส และว่าอุปกรณ์ให้ความรู้สึกตอบสนองและเชื่อถือได้หรือไม่ แพลตฟอร์มและระบบนิเวศเซ็นเซอร์ของ ST มักถูกเลือกที่นี่เพราะช่วยให้ทีมชั่งน้ำหนักความแม่นยำการรับรู้ การคำนวณภายใน และการเชื่อมต่อโดยไม่ต้องสร้างฮาร์ดแวร์เกินความจำเป็น
พายไลน์ IoT ที่ใช้งานได้จริงมักมีลำดับ: sensing → local compute → connectivity → cloud/app
เซ็นเซอร์ (การเคลื่อนไหว ความดัน อุณหภูมิ สัญญาณชีวภาพ) ผลิตข้อมูลดิบ MCU ที่ใช้พลังงานต่ำจัดการการกรอง เกณฑ์ เงื่อนไข และการตัดสินใจง่ายๆ เพื่อให้วิทยุส่งข้อมูลเฉพาะเมื่อจำเป็น การเชื่อมต่อ (Bluetooth LE, Wi‑Fi, sub‑GHz, เซลลูลาร์, หรือ LoRa) ส่งข้อมูลที่คัดเลือกไปยังโทรศัพท์หรือเกตเวย์ ซึ่งต่อไปยังแอปหรือเซอร์วิสคลาวด์สำหรับแดชบอร์ดและการแจ้งเตือน
แนวคิดสำคัญ: ยิ่งคุณตัดสินใจได้ในเครื่องมากเท่าไร แบตเตอรี่ยิ่งเล็กลงและการเชื่อมต่อยิ่งถูกลง
อายุแบตเตอรี่ไม่ค่อยเกี่ยวกับกระแสพีค แต่มักเกี่ยวกับเวลาที่อุปกรณ์อยู่ในโหมดนอน การออกแบบที่ดีเริ่มจากงบ: อุปกรณ์จะตื่นกี่นาทีต่อวันเพื่อสุ่มตัวอย่าง ประมวลผล และส่งข้อมูล?
ที่นี่ฟีเจอร์ของเซ็นเซอร์สำคัญเท่ากับ MCU: เซ็นเซอร์ที่ตรวจจับเหตุการณ์ได้เองจะป้องกันไม่ให้โปรเซสเซอร์หลักและวิทยุตื่นโดยไม่จำเป็น
UX ไม่ใช่แค่อินเทอร์เฟซ—มันคือพฤติกรรมของอุปกรณ์ เซ็นเซอร์การเคลื่อนไหวที่ทริกเกอร์จากการสั่นอาจทำให้เกิดการแจ้งเตือนเทียม เซ็นเซอร์สภาพแวดล้อมที่ตอบสนองช้าอาจพลาดการเปลี่ยนแปลงจริง และการออกแบบพลังงานที่ไม่ดีอาจเปลี่ยนคำสัญญา “แบตเตอรี่หนึ่งปี” เป็นสามเดือน
การเลือกเซ็นเซอร์และ MCU ไปด้วยกัน—บนพื้นฐานของสัญญาณรบกวน ความหน่วง และความสามารถประหยัดพลังงาน—ช่วยให้คุณส่งมอบอุปกรณ์ที่รู้สึกตอบสนอง หลีกเลี่ยงการแจ้งเตือนเทียม และบรรลุเป้าหมายอายุแบตเตอรี่โดยไม่เพิ่มขนาดหรือค่าใช้จ่าย
การควบคุมอุตสาหกรรมเน้นพฤติกรรมที่คาดเดาได้ในระยะยาว มากกว่าฟีเจอร์หรู ไม่ว่าคุณจะสร้างโมดูลใกล้ PLC, ตัวขับมอเตอร์, หรือโหนดมอนิเตอร์สภาพ แพลตฟอร์มต้องรองรับการกำหนดเวลาเชิงกำหนด ทนต่อสภาพแวดล้อมที่รุนแรง และซ่อมบำรุงได้ในระยะยาว
รูปแบบที่พบบ่อยคือ MCU-based “sidecar” ต่อ PLC: เพิ่ม I/O, การวัดเฉพาะ, หรือการเชื่อมต่อโดยไม่ต้องออกแบบตู้ควบคุมใหม่ MCUs ของ ST ยังใช้กันอย่างแพร่หลายในควบคุมมอเตอร์ (ไดร์ฟ ปั๊ม สายพาน), การวัดค่า, และการมอนิเตอร์สภาพ—รวมวงจรควบคุมเรียลไทม์กับการเก็บข้อมูลเซ็นเซอร์และการตัดสินใจท้องถิ่น
การควบคุมเชิงกำหนดหมายความว่าการสุ่มตัวอย่าง การสั่งงานวงจรควบคุม และเอาต์พุตเกิดขึ้นตามคาด—ทุกรอบ ตัวช่วยปฏิบัติ:
เป้าหมายการออกแบบคือให้หน้าที่ที่ต้องการเวลาแน่นคงที่แม้เมื่อการสื่อสาร การบันทึก หรือ UI งานอื่นยุ่ง
ไซต์อุตสาหกรรมมีแรงกดทางกลและการรบกวนไฟฟ้าที่อุปกรณ์ผู้บริโภคไม่ค่อยเจอ ข้อกังวลหลักได้แก่ การสั่น (โดยเฉพาะรอบมอเตอร์), ฝุ่นและการซึมผ่านของความชื้น, และสัญญาณรบกวนไฟฟ้าจากโหลดสวิตชิ่ง การเลือกและตำแหน่งเซ็นเซอร์มีความสำคัญ—accelerometers สำหรับมอนิเตอร์การสั่น, การวัดกระแส/แรงดันสำหรับไดร์ฟ, และเซ็นเซอร์สภาพแวดล้อมเมื่อสภาพภายในตู้มีผลต่อความน่าเชื่อถือ
สัญญาณอุตสาหกรรมหลายชนิดต้องผ่านขั้นตอนก่อนเข้าคอนโทรลเลอร์:
การปรับใช้ในอุตสาหกรรมต้องวางแผนอายุการใช้งานยาวนาน: ชิ้นส่วนสำรอง ความพร้อมของชิ้นส่วน และการอัปเดตเฟิร์มแวร์ที่ไม่รบกวนการดำเนินงาน แนวทางวงจรชีวิตปฏิบัติได้รวมเฟิร์มแวร์ที่มีเวอร์ชัน การอัปเดตที่ปลอดภัย และการวินิจฉัยชัดเจนเพื่อให้ทีมบำรุงรักษาแก้ปัญหาได้เร็วและรักษาเครื่องจักรให้อยู่ในสภาพทำงาน
การเชื่อมต่อคือจุดที่แพลตฟอร์มฝังตัวหยุดเป็นแค่ "บอร์ดกับเซ็นเซอร์" และกลายเป็นส่วนหนึ่งของระบบ: เครือข่ายในรถ อาคารที่เต็มไปด้วยอุปกรณ์ หรือสายการผลิต การออกแบบที่ใช้ ST มักจับคู่ MCU/MPU กับวิทยุหลายชนิดหรืออินเทอร์เฟซมีสายขึ้นกับงาน
BLE เหมาะกับลิงก์ระยะสั้นไปยังโทรศัพท์ เครื่องมือคอนฟิก หรือฮับใกล้เคียง ประหยัดพลังงาน แต่ไม่เหมาะกับอัตราข้อมูลสูงระยะไกล
Wi‑Fi ให้แบนด์วิดท์สูงขึ้นสำหรับอุปกรณ์ต่อเราเตอร์โดยตรง (กล้อง เครื่องใช้ ไม้ตั้งเป็นเกตเวย์) ข้อแลกคือต้องใช้พลังงานมากขึ้นและการออกแบบเสา/ตัวถังจะต้องละเอียด
Ethernet เป็นที่นิยมในโรงงานเพื่อความน่าเชื่อถือของสายและพฤติกรรมที่คาดเดาได้ และยังใช้ในยานยนต์ (Automotive Ethernet) เมื่อความต้องการแบนด์วิดท์เพิ่ม
เซลลูลาร์ (LTE-M/NB-IoT/4G/5G) ใช้เมื่อต้องการคลอบคลุมพื้นที่กว้างเมื่อไม่มีโครงสร้างพื้นฐานท้องถิ่น เพิ่มต้นทุน ความพยายามการรับรอง และข้อพิจารณาด้านพลังงาน—โดยเฉพาะการใช้งานที่ต้องเชื่อมต่อเสมอ
Sub‑GHz (เช่น 868/915 MHz) มุ่งระยะไกลที่อัตราข้อมูลต่ำ เหมาะกับเซ็นเซอร์ที่ส่งแพ็กเก็ตเล็กๆ ไม่บ่อย
เริ่มจาก ระยะและขนาดข้อความ (เช่น การอ่านอุณหภูมิเทียบกับการสตรีมเสียง) แล้วตรวจสอบ อายุแบตเตอรี่ และ ความต้องการกระแสพีค สุดท้ายคำนึงถึง ข้อบังคับภูมิภาค (เซลลูลาร์ที่ต้องรับรอง vs ข้อจำกัดช่องสัญญาณ/กำลังส่งของ sub‑GHz)
เกตเวย์ท้องถิ่น เหมาะเมื่อคุณต้องการจุดสิ้นสุดที่ประหยัดพลังงานมาก เชื่อมโปรโตคอล (BLE/sub‑GHz ไปยัง Ethernet) หรือต้องการบัฟเฟอร์เมื่ออินเทอร์เน็ตขัดข้อง
การส่งตรงสู่คลาวด์ ทำให้สถาปัตยกรรมเรียบง่ายสำหรับอุปกรณ์เดี่ยว (Wi‑Fi/เซลลูลาร์) แต่ผลักความซับซ้อนไปที่การออกแบบพลังงาน การโปรวิชั่น และค่าใช้จ่ายการเชื่อมต่อต่อเนื่อง
ประสิทธิภาพเสาอาจเสียหายจากตัวถังโลหะ แบตเตอรี่ พันสายเคเบิล หรือแม้แต่มือผู้ใช้ วางแผน ระยะห่าง เลือกวัสดุอย่างระมัดระวัง และทดสอบตั้งแต่เนิ่นๆ กับตัวถังสุดท้าย—ปัญหาการเชื่อมต่อมักเป็นเรื่องเชิงกลไม่ใช่ซอฟต์แวร์
ความปลอดภัยไม่ใช่ฟีเจอร์เดียวที่ "เพิ่มทีหลัง" กับแพลตฟอร์มฝังตัวและเซ็นเซอร์ มันคือชุดการตัดสินใจตั้งแต่เปิดเครื่องจนถึงทุกการอัปเดตเฟิร์มแวร์จนกว่าจะปลดระวางผลิตภัณฑ์
พื้นฐานที่ใช้กันทั่วไปคือ secure boot: อุปกรณ์ตรวจสอบว่าเฟิร์มแวร์ถูกต้องก่อนรัน บนแพลตฟอร์ม ST มักจะใช้รากความเชื่อถือในฮาร์ดแวร์ (เช่น คุณสมบัติความปลอดภัยของ MCU และ/หรือ secure element) บวกกับภาพที่ลงนาม
ถัดมาคือ การเก็บคีย์ ควรเก็บคีย์ในพื้นที่ที่ออกแบบมาเพื่อต้านการสกัด—ไม่ใช่เก็บในแฟลชที่อ่านได้ง่าย—ซึ่งช่วยให้มี การอัปเดตเฟิร์มแวร์ที่เข้ารหัส โดยอุปกรณ์ทั้งตรวจสอบลายเซ็น (ความสมบูรณ์/ความถูกต้อง) และถอดรหัสพาโลด (ความลับ) ก่อนติดตั้ง
อุปกรณ์ IoT ฝั่งผู้บริโภคมักเผชิญการโจมตีขนาดใหญ่ระยะไกล (botnets, credential stuffing, การเข้าถึงทางกายภาพราคาถูก) ระบบอุตสาหกรรมกังวลกับการรบกวนที่มีเป้าหมาย การหยุดทำงาน และการมีหน้าต่างอัปเดตจำกัด ยานยนต์ต้องจัดการความเสี่ยงที่เกี่ยวข้องกับความปลอดภัย, โซ่อุปทานซับซ้อน, และการควบคุมว่าใครอัปเดตอะไรได้บ้าง—โดยเฉพาะเมื่อหลาย ECU แชร์เครือข่ายในรถ
วางแผนสำหรับ provisioning (ฉีดคีย์/ตัวตนในระหว่างการผลิต), อัปเดต (A/B swap หรือการป้องกันการย้อนกลับเพื่อหลีกเลี่ยงการทำให้อุปกรณ์ใช้งานไม่ได้), และ decommissioning (เพิกถอน credential, ล้างข้อมูลสำคัญ, และ document พฤติกรรมสิ้นสุดการสนับสนุน)
เก็บบันทึกที่ชัดเจนของ: โมเดลภัยคุกคามของคุณ, ฟลูว์ secure boot/update, การจัดการคีย์และการหมุนเวียน, นโยบายรับรายงานช่องโหว่และแพตช์, SBOM และหลักฐานการทดสอบ (ผลการเจาะช่องโหว่, บันทึกการฟัซซิง, แนวทางการเขียนโค้ดปลอดภัย) บรรยายสิ่งที่คุณทำและวัดผล—หลีกเลี่ยงการอ้างว่าผ่านการรับรองเว้นแต่จะผ่านการทดสอบจริง
แพลตฟอร์มฝังตัวคือพื้นฐานที่นำกลับมาใช้ใหม่ได้สำหรับผลิตภัณฑ์: อุปกรณ์ประมวลผลหลัก (MCU/MPU), ส่วนประกอบสนับสนุน (พาวเวอร์, นาฬิกา, การเชื่อมต่อ), รวมถึงเครื่องมือสำหรับพัฒนา, แบบอ้างอิงการออกแบบ และไลบรารีเฟิร์มแวร์。
การใช้ตระกูลแพลตฟอร์มที่สอดคล้องกันมักช่วยลดความเสี่ยงจากการออกแบบซ้ำและเร่งระยะเวลาจากต้นแบบสู่การผลิต
ระบบนิเวศเซ็นเซอร์หมายถึงมากกว่าแค่หมายเลขชิ้นส่วนของเซ็นเซอร์ มันรวมถึงไดรเวอร์ ตัวอย่างโค้ด แนวทางการคาลิเบรชัน และบางครั้งอัลกอริธึมที่พร้อมใช้ ซึ่งแปลงสัญญาณดิบให้เป็นผลลัพธ์ที่ใช้ได้ (เหตุการณ์, องศาทิศทาง, เมตริก)
ข้อดีคือการรวมเข้ามาได้เร็วขึ้นและลดความประหลาดใจเมื่อขยายจากต้นแบบเป็นการผลิตจำนวนมาก
เลือก MCU เมื่อคุณต้องการ:
เลือก MPU เมื่อคุณต้องการ:
ชุดอุปกรณ์ต่อพ่วงมักแคบตัวเลือกได้เร็วกว่าความเร็วซีพียู ตัวอย่างปัจจัยที่มักเป็นตัวตัดสิน:
เรียลไทม์หมายถึง การกำหนดเวลาเชิงเลวร้ายที่สุดที่สม่ำเสมอ ไม่ใช่แค่ความเร็วสูง ขั้นตอนปฏิบัติ:
MCU มักเป็นทางเลือกที่ง่ายกว่าเพื่อให้ได้ความเสถียร; MPU ก็ทำได้ แต่ต้องปรับแต่ง OS/ไดรเวอร์มากขึ้น
MEMS (micro-electro-mechanical systems) คือโครงสร้างเชิงกลขนาดจิ๋วที่ผลิตบนซิลิคอนและแพ็กเกจเหมือน IC
เซ็นเซอร์ MEMS เป็นที่นิยมเพราะขนาดเล็ก กินพลังงานต่ำ และต้นทุนต่อหน่วยต่ำ เหมาะสำหรับอุปกรณ์สวมใส่ โทรศัพท์ และโหนดอุตสาหกรรมหนาแน่น
โฟกัสที่สิ่งที่จะเปลี่ยนพฤติกรรมระบบของคุณ:
จากนั้นตรวจสอบกับการติดตั้งเชิงกลจริง—ตำแหน่งติดตั้งมักมีผลมากกว่าตัวเลขบน datasheet
การผสานเซ็นเซอร์รวมข้อมูลจากหลายเซ็นเซอร์ (มักเป็น accel + gyro + magnetometer บางครั้งมี pressure/GNSS) เพื่อให้ได้ผลลัพธ์ที่นิ่งและมีความหมาย เช่น ออร์ริเอ้นเทชัน ก้าวเดิน ระดับการสั่น หรือการตัดสินใจอยู่กับที่/เคลื่อนไหว
ช่วยเพราะแต่ละเซ็นเซอร์มีจุดอ่อนเมื่อยืนคนเดียว (เช่น ไจโรสโคปลอย, แม็กเนโตมิเตอร์ถูกรบกวน, accelerometer แยกแรงโน้มถ่วงจากการเคลื่อนไหวยาก)
ประมวลผลที่ขอบ (edge) ลดแบนด์วิดท์และพลังงานโดยส่ง ผลลัพธ์ แทนการส่งสตรีมดิบ (เช่น “tilt = 12°” หรือ “ตรวจจับเหตุการณ์” แทนการส่งข้อมูลพันๆ ค่า)
ยังช่วยด้านความเป็นส่วนตัวด้วย เพราะเก็บร่องรอยการเคลื่อนไหวดิบไว้ในอุปกรณ์และส่งเฉพาะเหตุการณ์หรือเมตริกที่สรุปแล้ว
จัดการความปลอดภัยเป็นวงจรชีวิต:
บันทึกโมเดลภัยคุกคาม ขั้นตอนอัปเดต การจัดการคีย์ SBOM และนโยบายแพตช์—อย่าอ้างว่าผ่านการรับรองเว้นแต่จะทำจริง